Pengembangan Sistem Kontrol Robot Pneumatik Pick And Place dengan Raspberry Pi Berbasis Internet Of Things (IoT)
Abstract
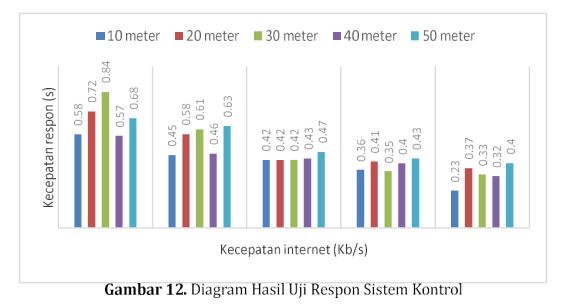
Era industri 4.0 merupakan kondisi yang mengharuskan adanya suatu perubahan besar-besaran dengan memadukan teknologi yang ada. Penggunaan teknologi robot pneumatik pick and place dengan sistem kontrol berbasis Internet of Things (IoT) merupakan salah satu cara untuk meningkatkan produktivitas dan menekan biaya produksi. Tujuan penelitian ini yaitu mengetahui rancangan sistem kontrol robot dan mengetahui tingkat kelayakan sistem kontrol robot pick and place dengan Raspberry Pi berbasis Internet of Things (IoT). Penelitian ini menggunakan model pendekatan penelitian dan pengembangan RnD (Research dan Development). Hasil dari penelitian ini yaitu terwujudnya sistem kontrol robot pneumatik pick and place dengan dimensi 59 x 40 x 20 cm. Sistem kontrol robot pneumatik pick and place memperoleh persentase kelayakan produk 86,7 % dengan kategori sangat layak. Berdasarkan hasil penelitian, sistem kontrol robot pneumatik pick and place mampu merespon dengan kecepatan 0,5 detik dengan menggunakan rata-rata kecepatan internet yaitu 1,49 Kb/s dengan jarak maksimal pengguna yaitu 50 meter.
References
Indriyanto, Rudy F. dkk. 2018. Rancag Bangun Sistem Pengepresan Dengan Penggerak Pneumatik Pada Mesin Press dan Potong Untuk Pembuatan Kantong Plastik Ukuran 300x550 mm. Jurnal SIMETRIS 9(2): 1053-1060.
Kumar, S.S 2015. Design of Pick and Place Robot. International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering 4(6): 4887-4898.
Oktariawan I., dkk. 2013. Pembuatan Sistem Otomasi Dispenser Menggunakan Mikrokontroler Arduino Mega 2560. Jurnal FEMA 1(2): 18-24.
Putro, M. D., Litouw, J. 2017. Robot Pintar Penyambut Costumer pada Pusat Perbelanjaan Kota Manado. Jurnal Rekayasa Elektrika 13(1): 8-17.
Sugiyono, 2014. Metode Penelitian Kombinasi (Mixed Methods) Cetakan ke-6. Bandung: Alfabeta.
Syahril, Ahmad dan Hidayat, M. F., 2018. PerancanganUlang Peralatan Pneumatic Berbasis Programmable Logic Control (PLC) untuk KEgiatan Praktikum. Edisi terbit 1. Jakarta Utara: Jurnal Konversi Energi dan Manufaktur UNJ.
Ulfa, N. W., 2016. Impelemntasi Open Meetings MEnggunakan Rasberry Pi Sebagai Server. Skripsi. Program Sarjana Universitas Islam Negeri Alauddin. Makasar.